Autonomous Ground Support Equipment (AGSE)
The AGSE is an autonomous launch tower designed to pick up a sample payload, insert it into the rocket, raise the rocket to launch position, and install the motor igniter. It is a completely aluminum welded assembly weighing under 150 lbs and successfully completed its mission in the 2015-2016 NASA Centennial Challenge. More detail can be found below and in the team's technical documentation.

AGSE setup before competition event.
Design overview
Weighing just under 150 lbs, this solid aluminum ground station was designed to simulate a martian payload return mission. It has a robotic arm, igniter installer, and vehicle lifter which are all actuated autonomously via a central microcontroller. The AGSE also features a Human Machine Interface (HMI) panel which displays a touchscreen GUI running on a Raspberry Pi.
As the electrical lead on this project I was responsible for the harnessing, circuit design, and programming involved in automating the AGSE's simulated martian mission.
Main Controller
The main controller is responsible for commanding the actuation of the AGSE's various parts. It is made up of an Arduino Mega, a custom PCB shield, and various H-bridge motor controllers. Shown to the right is an image of the main controller enclosure after I had just assembled it.
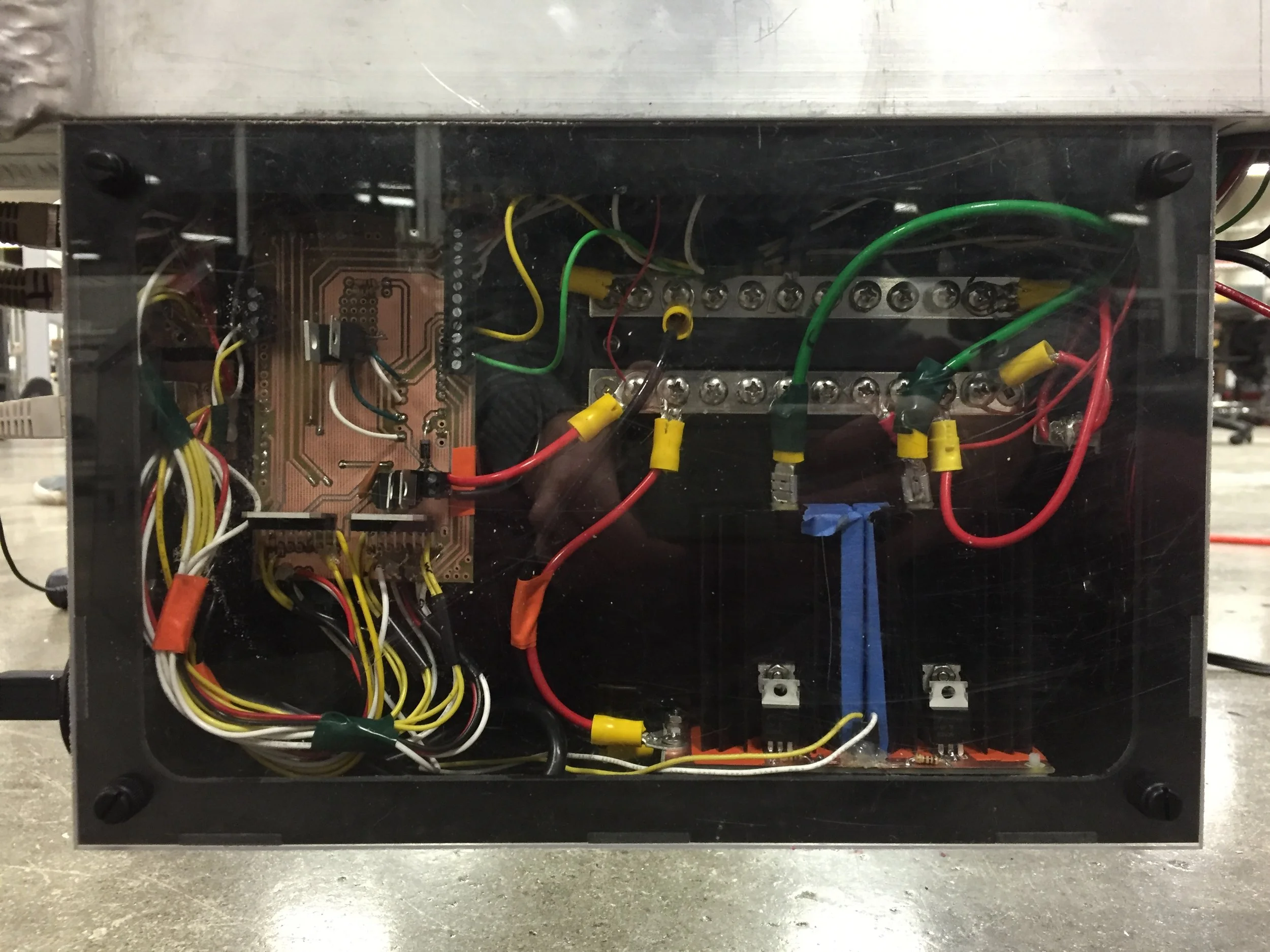
The AGSE's main controller enclosure.
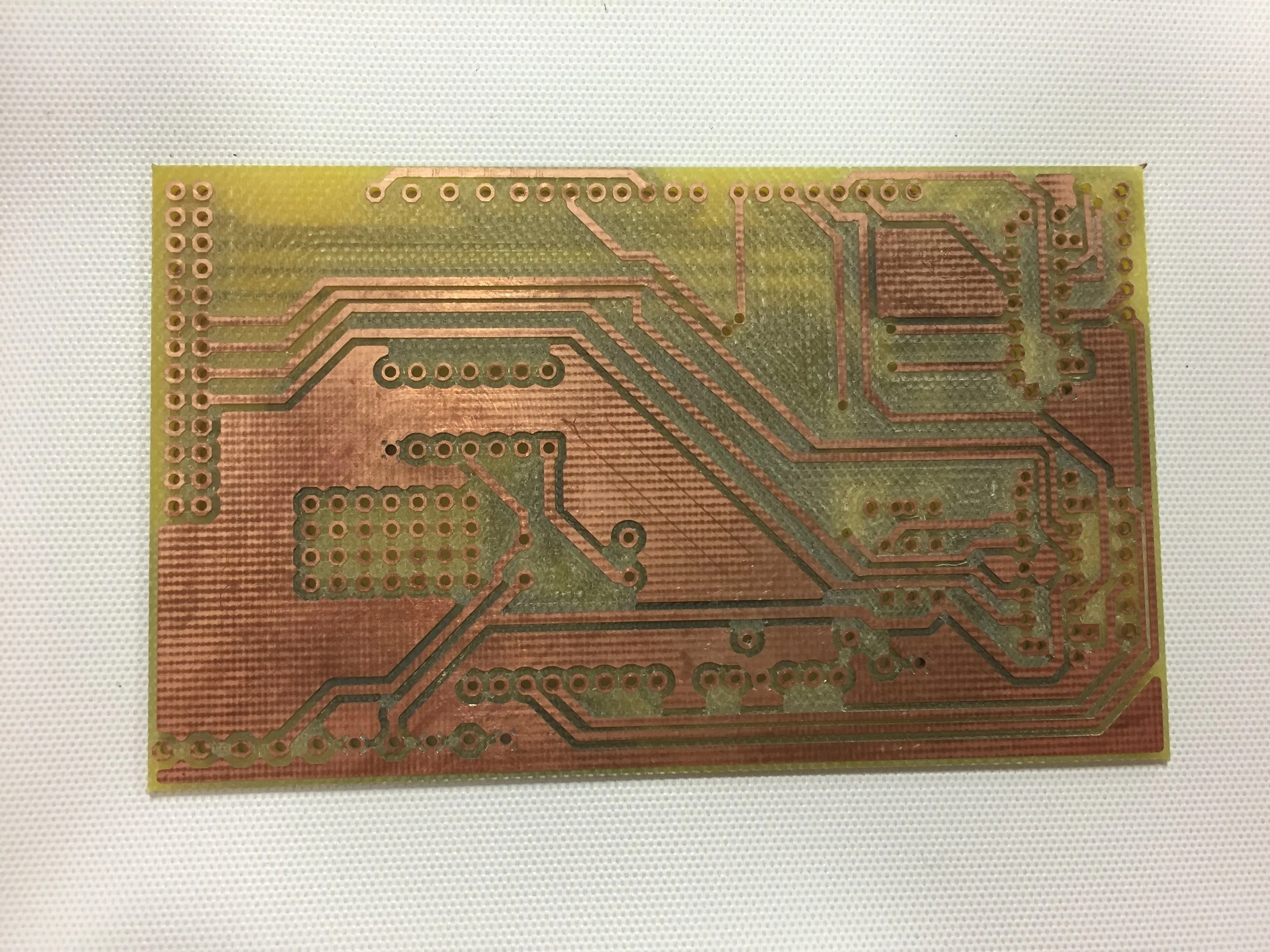
AGSE main controller shield PCB.
Custom PCB Shield
It was during this project that I first learned to use EagleCad to design PCBs. Shown on the left is the PCB that I designed for the main controller. In addition to learning how to design PCBs, I also got the opportunity to learn how to manufacture them as well at a rapid prototyping facility near my university. Doing so greatly increased my PCB design skills.